Transformasi Linear
TRANSFORMASI LINEAR
Dalam bagian ini kita mulai mempelajari fungsi bernilai vektor dari sebuah peubah vektor. Yakni, fungsi yang berbentuk w = F(v), dimana baik peubahbebas v maupun peubah tak-bebas w adalah vektor. Kita akan memusatkan perhatian pada kelompok khusus fungsi vektor yang kita namakantransformasi linear. Kelompok fungsi ini mempunyai banyak penerapan penting dalam fisika, bidang teknik, ilmu sosial, dan berbagai cabang matematika.
Jika V dan W adalah ruang vektor dan F adalah sebuah fungsi yang mengasosiasikan vektor unik di W dengan setiap vektor terletak di V, maka kita katakan Fmemetakan V ke dalam W, dan kita tuliskan F:VàW. lebih lanjut lagi, jika Fmengasosiasikan vektor w dengan vektor v, maka kita tuliskan w = F(v) dan kita katakan bahwa w adalah bayangan dari v di bawah F. ruang vektor V dinamakan domainF.
Untuk melukiskannya, jika v = (x,y) adalah sebuah vektor di R2, maka rumusnya mendefenisikan sebuah fungsi yang memetakan R2 ke dalam R3. Khususnya jika v = (1,1), maka x = 1 dan y = 1, sehingga bayangan dari v di bawah F adalah F(v) = (1,2,0) dengan demikian , domain F adalah R2. Defenisi, jika F:V W adalah sebuah fungsi dari ruang vektor V ke dalam ruang vektor W, maka F kita namakan transformasi linear ( linear transformasi) jika
(i) F(u + v) = F (u) + F (v) untuk semua vektor u dan v di V.
(ii )F(ku) = kF(u) untuk semua vektor u di dalam V dan semua skalar k.
Untuk melukiskannya, misalnya F:R2àR3 adalah fungsi yang didefinisikan oleh pers. 1, , sehingga demikian juga, jika k adalah sebuah skalar, ku = (kx1, ky1), sehingga jadi, F adalah sebuah transformasi linear.
Jika F:VàW adalah sebuah transformasi linear, maka untuk sebarang v1 dan v2 di V dan sebarang skalar k1 dan k2, kita peroleh demikian juga, jika v1, v2, ……,vn adalah vektor-vektor di V dan k1, k2,…….kn adalah skalar, maka kita sekarang memberikan contoh lebih lanjut mengenai transformasi linear.
Contoh 1
Misalkan A adalah sebuah matriks m x n tetap. Jika kita menggunakan notasi matriks untuk vektor diRm dan Rn, maka dapat kita defenisikan sebuah fungsi T :RnàRmdengan : T(x) = Ax
Perhatikan bahwa jika x adalah sebuah matriks n x 1, maka hasil kali Ax adalah matriks m x 1 ; jadi T memetakan Rn ke dalam Rm. lagi pula, T linear, untuk melihat ini, misalkan u dan v adalah matriks n x 1 dan misalkan k adalah sebuah skalar. Dengan menggunakan sifat-sifat perkalian matriks, maka kita dapatkan atau secara ekivalen kita menamakan transformasi linear pada contoh ini perkalian oleh A. Transformasi linear semacam ini dinamakan transformasi matriks.
Contoh 2
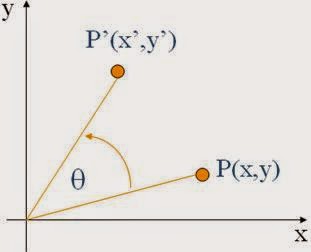
Sebagai kasus khusus dari contoh sebelumnya, misalnya adalah sebuah sudut tetap, dan misalnya T :2nàR2 adalah perkalian oleh matriks jika v adalah vektor
Maka
Secara geometris, maka adalah vektor yang dihasilkan jika v dirotasikann melalui sudut . Untuk melihat ini, maka misalkan adalah sudut diantara v dan sumbu x positif, dan misalkan adalah vektor yang dihasilkan bila v dirotasikan melalui sudut pada gambar di bawah. Kita akan memperlihatkan jika r menyatakan panjangnya sebagai v, maka demikian juga, karena mempunyai panjang yang sama seperti v, maka kita peroleh sehingga transformasi linear pada contoh ini kita namakan perputaran R2 melalui sudut .
Contoh 3
Misalkan V adalah sebuah ruang vektor berdimensi n dan S = ( w1, w2,…….., wn) adalah sebuah basis tetap untuk V. Menurut Teorema 29 dari bagian 4.10 maka sebarang dua vektor dan v di V dapat dituliskan secara unik dalam bentuk
Jadi
Tetapi
Sehingga
Maka
Demikian juga, untuk matriks koordinat kita peroleh
Misalkan kita ambil T : V à Rnsebagai fungsi yang memetakan sebuah vektor v di V dimana vektor koordinatnya bersesuaian terhadap S ; yakni
Maka rumus-rumus di T, pada a dan b menyatakan bahwa
Dan
Jadi, T adalah transformasi linear dari V ke dalam Rn.
B. SIFAT TRANSFORMASI LINEAR : KERNEL DAN JANGKAUAN
Pada bagian ini kita mengembangkan beberapa sifat dasar transformasi linear. Khususnya, kita memperlihatkan bahwa sekali bayangan vektor basis di bawah transformasi linear telah diketahui, maka kita mungkin mencari bayangan vektor yang selebihnya dalam ruang tersebut.
Teorema 1.
Jika T:V W adalah transformasi linier, maka :
(a) T(0) = 0
(b) T(-v) = -T(v) untuksemua v di V
(c) T(v-w) = T(v) – T(w) untuksemu v dan w di V.
|
Bukti, Misal v adalah sebarang vektor di V. Karena 0v = 0 maka kita peroleh
T(0) = T(0v) = 0T(v) = 0
Yang membuktikan (a).
Juga, T(-v) = T [(-1)v] = (-1)T(v) –T(v), yang membuktikan (b).
Akhirnya, v - w = v + (-1)w; jadi
T(v-w) = T(v + (-1)w)
= T(v) + (-1) T(w)
= T(v) – T(w)
Definisi.Jika T:V W adalahtransformasi linear, makahimpuanvektor di V yang dipetakan T kedalam 0 kitanamakankernel (ruangnol) dari T; himpuantersebutdinyatakanolehker (T). Himpunansemuavektor di W yang merupakanbayangan di bawah T dari paling sedikitatauvektor di V kitanamakanjangkauandari T; himpunantersebutdinyatakanoleh R(T).
|
Teorema 2.
Jika V:T W adalahtransformasi linear, maka :
(a) Kernel dari T adalahsubruangdari V.
(b) Jangkauandari T adalahsubruangdari W.
|
(a) Untuk memperlihatkan bahwa ker(T) adalah subruang, maka kita harus memperlihatkan bahwa ker(T) tersebut tertutup di bawah pertambahan dan perkalian skalar. Misalkan v1 dan v2 adalah vektor-vektor dalam ker(T), dan misalkan k adalah sebarang skalar. Maka
T (v1 + v2 ) = T(v1) + T(v2)
= 0 + 0 = 0
Sehingga v1 + v2 berada dalam ker(T). Juga,
T(k v1) = kT(v1) = k0 =0
Sehingga k v1 berada dalam ker(T).
(b) Misalkan w1 dan w2 adalah vektor dalam jangkauan T. Untuk membuktikan bagian ini maka harus kita perlihatkan bahwa w1 + w2 dan k w1 berada dalam jangkauan T untuk sebarang skalar k; yakni, kita harus mencari vektor a dan b di V sehingga T(a) = w1 + w2 dan T(b) = k w1. Karena w1 dan w2 berada dalam jangkauan T, maka vektor a1 dan a2 dalam V sehingga T(a1) = w1 dan T(a2) = w2. Misalkan a = a1 +a2 dan b = ka1. Maka
T(a) = T(ka1) = kT(a1) = kw1
Yang melengkapkan bukti tersebut.
Definisi.Jika T:V W adalahtransformasi linear, makadimensijangkauandari T dinamkanrankT, dandimensi kernel dinamakannulitas (nullity) T.
|
Teorema kita berikutnya menghasilkan hubungan diantara rank dan nulitasn dari transformasi linear yang yang didefinisikan pada ruang vektor berdimensi berhingga. Kita akan menagguhkan buktinya hingga ke akhir bagian ini.
Teorema 3: (TeoremaDimensi).
Jika T:V W adalahtransformasi linear dariruang vector V yang berdimensi n kepadasebuahruang vector W, maka (rankdari T) + (nulitasdari T) = n……(5.4)
|
Dengan kata lain, teorema ini menyatakan bahwa rank + nulitas dari transformasi linear sama dengan dimensi domainnya.
Dalam kasus-kasus ndimana V = Rn , W = Rm , dan T:V à W merupakan perkalian oleh sebuah matriks A yang berukuran m x n , berikutnya dari (5.4) dan contoh lain diatas bahwa:
Rank(A) = dim(ruang pemecahan Ax = 0) = n
Jelasnya, teorema ini menyatakan bahwa dimensi ruang pemecahan Ax = 0 sama dengan jumlah kolom A kurang rank A.
PERNYATAAN. Karena system linear homogen Ax = 0 harus konsisten, berikutnya dari teorema 18. Bagian 4.6 bahwa rank matriks A sama dengan jumlah parameter dalam pemecahan Ax = 0. Dengan menggunakan hasil ini dengan teorema 4, selanjutnya dengan mengacu pada ruang pemecahan Ax = 0 akan sama dengan jumlah kolom A kurang jumlah parameter dalam pemecahan Ax= 0
Contoh
Pada contoh contoh sebelumnya kita telah memperlihatkan bahwa system homogeny
2x1 + 2x2 – x3 +x5 = 0
-x1 + x2 + 2x3 – 3x4 + x5 = 0
X1 +x2 – 2x3 - x5 = 0
X3 + x4 + x5 = 0
Mempunyai ruang pemecahan berdimensi dua, dengan memecahkan system tersebut dan dengan mencari sebuah basis. Karena matriks koefisien
Sehingga rank (A) = 3. Anda dapat memeriksa hasil ini dengan mereduksi A pada bentuk eselon baris dan dengan memperlihatkan bahwa matriks yang dihasilkan mempunyai tiga baris tak 0.
Bukti teorema 3.
Kita harus memperlihatkan bahwa Dim [R(T)] + dim [ker(T] + n Kita akan memberikan bukti tersebut untuk kasus dimana 1≤dim[ker(T)≤. Kasus dim[ker(T)] = 0 dan dim [ker(T)] = n sengaja kami biarkansebagai latihan anda. Anggaplah dim [ker(T)] = r, dan misalkan v1,…., vr adalah sebuah basis untuk kernel tersebut. Karena {v1,……,vr} bebas linear, maka bagian (c) dari teorema 11 dalam bagian 4.5 menyatakan bahwa terdapat n-r vector, vr+1,….vn, sehingga {v1, …, vr, vr+1, …,vn} adalah sebuah basisi untuk V. untuk melengkapkan bukti tersebut, kita akan memperlihatkan bahwa vector ke n-r dalam himpunan S= {T(vr+1),…, T(vn) membentuk sebuah basis untuk jangkauan T. maka jelaslah bahwa :
Mula-mula kita memperlihatkan bahwa S merentang jangkauan T. jika b adalah sembarang vector dalam jangkauan T, makan b = T(v) untuk suatu vector v dalam V. karena {v1, …, vr, vr+1, …,vn} adalah basis untuk V, maka dapat dituliskan dalam bentuk karena v1,…, vr terletak dalam kernel T, maka T(v1) = … = T(vr) = 0, sehingga jadi, S merentang jangkauan T.
Akhirnya, kita memperlihatkan bahwa S adalah sebuah himpunan bebhas dan sebagai konsekuansinya maka akan membentuk basis untuk jangkauan T. misalkan suatu kombinasi linear dari vector-vektor di S adalah nol; yakni,
Kita harus memperlihatkan bahwa kr+1 = … = kn =0. Karena T linear,maka (5,5) dapat dituliskan kembali sebagai yang mengatakan bahwa kr+1vr+1 + … + knvn = berada dalam kernel T. maka vector ini dapat dituliskan sebagai kombinasi linear dari vektor-vektor basis {v1, …, vr} katakanlah,
Jadi,
Karena {v1, …, vn} bebas linear, maka semuanya k sama dengan nol; khususnya kr+1 = … = kn =0, yang melengkapi bukti tersebut .

Komentar
Posting Komentar